背景
水中ロボティクスは、海底探査、環境モニタリング、水中インフラの検査・修理など、多様な応用が期待される分野です。しかし、従来の硬質ロボットは、複雑な海底地形や繊細な生物、あるいは不規則な形状の物体を扱う際に、柔軟性や適応性に欠けるという課題を抱えていました。特に、水中での物体の把持には、対象物に適応できる柔軟性と、しっかりと保持するための高い剛性の両方が求められますが、これを両立させることは困難でした。さらに、水中でのアクチュエーションには多大なエネルギーが必要であり、長時間のミッションでは電力供給が大きな制約となります。生物、特にタコのような軟体動物は、その触腕の柔軟性と剛性を自在に変化させる能力により、複雑な形状の物体を巧みに操作します。この自然界のメカニズムから着想を得た、新しい水中グリッパーの開発が強く求められていました。
主要内容
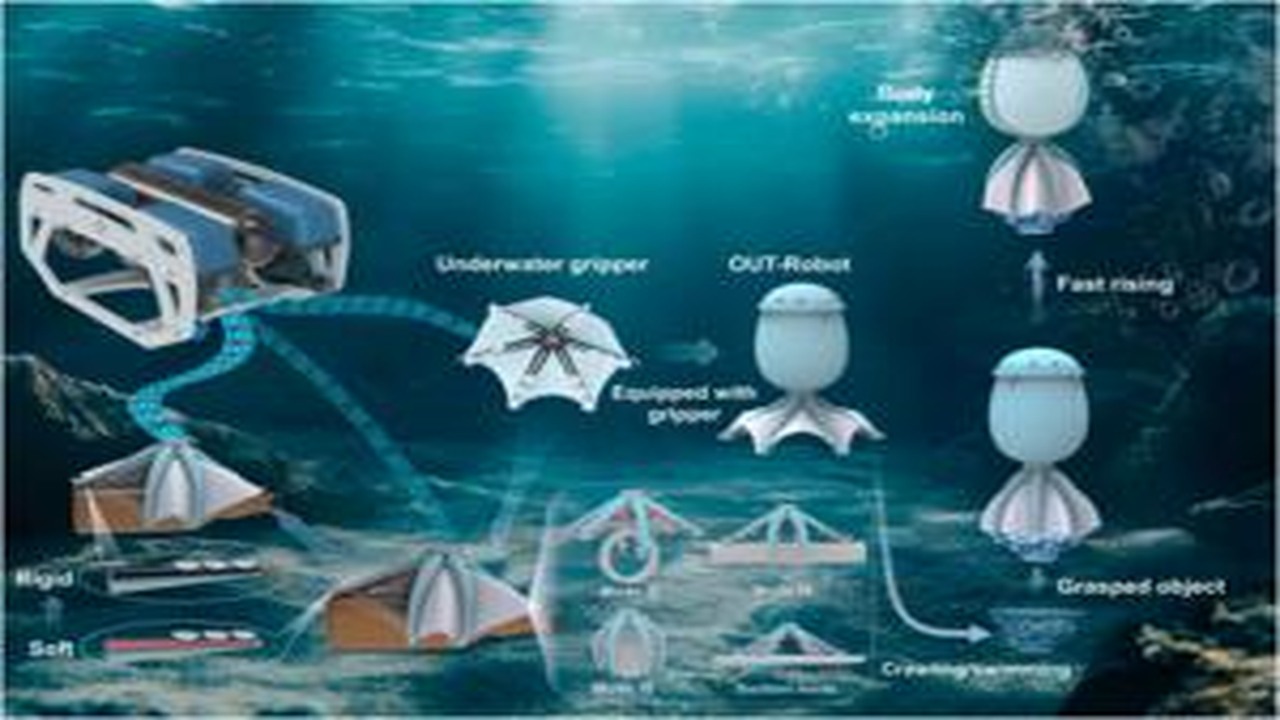
北京大学の研究チームは、タコの触腕からインスピレーションを得て、高速剛性チューニングとゼロエネルギーでの物体運搬を可能にする革新的な水中グリッパーロボット「Octopus-Inspired Upward Transport Robot (OUT-Robot)」を開発しました。このブレークスルーは、以下の主要な技術的特徴によって実現されています。
- 形状記憶ポリマー(SMP)ベースの可変剛性アーム: グリッパーの6本の柔軟なアームには、形状記憶ポリマー(SMP)の一種であるポリ乳酸(PLA)が埋め込まれています。PLAは、温度によって柔軟な状態と硬い状態を切り替えることができます。
- 三層熱インターフェースによる高速剛性チューニング: SMPの加熱・冷却を効率化するため、研究チームは独自の三層熱インターフェースを開発しました。このインターフェースは、発熱体、熱拡散層、SMP層から構成され、熱伝達を最適化します。その結果、グリッパーは電圧を印加するとわずか1.3秒で軟化し、加熱を停止すると0.8秒という驚異的な速度で硬化する性能を達成しました。これは、これまで報告されたSMPベースの剛性切り替えシステムの中で最速の部類に入ります。硬化したSMPを持つ単一アームは、SMPがないアームよりも約25倍高い剛性を示します。
- 「ソフト-リジッドハイブリッド」操作とゼロエネルギー形状ロック: グリッパーは、柔軟な状態で物体に適合し、その後高速で硬化して物体をしっかりと把持します。この「ソフト-リジッドハイブリッド」操作アプローチにより、複雑な形状の物体でも確実に掴むことができます。さらに、一度硬化すると、追加のエネルギーを消費することなくその剛性を維持できる「ゼロエネルギー形状ロック」機能も備えています。これにより、長時間の水中ミッションでも電力消費を最小限に抑えながら物体を運搬することが可能です。
- 協力的な把持力: 6本のアームが協力して物体を把持することで、4ニュートン(約400グラム以上)もの把持力を達成しました。これは、水中での様々な物体、例えばプラスチック廃棄物などを効率的に回収するのに十分な力です。
影響と展望
このタコ型水中グリッパーロボットの開発は、水中ロボティクス分野に大きな革命をもたらす可能性を秘めています。その応用範囲は多岐にわたり、例えば以下のような分野で貢献が期待されます。
- 環境清掃: 海洋に漂流するプラスチック廃棄物の回収や、海底に沈んだゴミの除去作業。
- 資源回収: 海底鉱物資源や難破船からの物資回収。
- 海底探査・メンテナンス: 油田・ガス田設備の検査、ケーブル敷設、生物多様性調査など。
特に、高速剛性チューニングとゼロエネルギー形状ロック機能は、水中での長時間かつ自律的なミッションの実現可能性を飛躍的に高めます。これにより、ロボットがエネルギー効率を維持しながら、より複雑で困難な作業を実行できるようになります。今後の課題としては、SMPの疲労寿命の長期評価、より深海や高圧環境での耐久性検証、そしてより複雑なマニピュレーションへの応用可能性の探求が挙げられます。この研究は、バイオインスパイアードデザインと先端材料科学の融合が、未来のロボティクス技術をどのように形作るかを示す好例であり、持続可能な海洋環境の保全と利用に不可欠なツールを提供することになるでしょう。








コメント