背景:ソフトロボットの進化とアクチュエータの課題
ソフトロボットは、柔軟な材料で構成されており、複雑な環境に適応したり、デリケートな物体を安全に扱ったりする能力から、医療、探索、人間との協調作業など、幅広い分野での応用が期待されています。しかし、ソフトロボットの動きを制御する「筋肉」となるアクチュエータは、高い出力密度、迅速な応答性、そして人間の筋肉のような複雑な多方向の変形能力を同時に実現することが困難でした。特に、3Dプリンティングによる製造は、複雑な形状を容易に作成できる利点があるものの、異なる機能を持つ材料を統合して多機能なアクチュエータを一度に製造する技術はまだ発展途上でした。
主要な進展:螺旋配向LCEを用いた複合3Dプリンティング
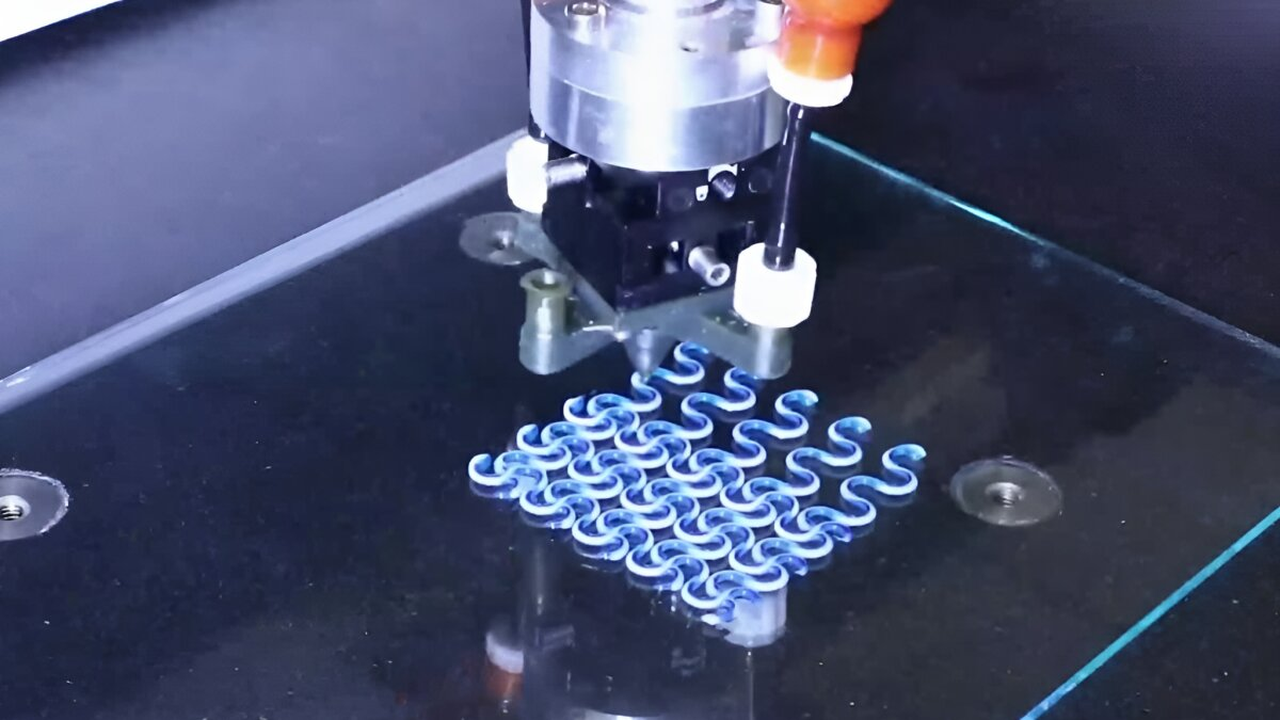
ハーバード大学の研究チームは、この課題を解決するため、2種類の柔軟なエラストマーを統合的に3Dプリンティングする革新的な技術を開発しました。この技術の核となるのは、特定の温度変化に応答して収縮する「液晶エラストマー(LCE)」と、構造的な安定性を提供し、変形に抵抗する「受動的なエラストマー」の組み合わせです。研究者たちは、独自に設計した回転ノズルを使用し、3Dプリンティング中にLCEの分子配列を精密に「螺旋状」に配向させることに成功しました。この螺旋配向が、アクチュエータの動作に劇的な影響を与えます。従来のLCEアクチュエータは主に単純な伸縮や曲げに限定されていましたが、螺旋構造を持つことで、特定の温度刺激に対して予測可能かつ制御されたねじれや屈曲といった複雑な多方向の変形を生成できるようになりました。これにより、単一のアクチュエータで、人間の腕や指のような複雑な動きを模倣する「筋肉」を実現する道が開かれました。
技術的意義と今後の展望
この複合3Dプリンティング技術は、ソフトロボットのアクチュエータ設計に新たな可能性をもたらします。LCEの分子配向を精密に制御できることで、ロボットの動きの方向、速度、強度をこれまでにないレベルでカスタマイズできるようになります。これは、手術用ロボットがより繊細な操作を行う能力を高めたり、義肢がより自然な動きを実現したり、あるいは災害現場で瓦礫の中を進む探索ロボットがより柔軟に環境に適応したりするなど、多様な応用が期待されます。さらに、この技術は、人間の筋肉の複雑な機能を模倣するバイオインスパイアードロボットの開発を加速させ、ソフトロボットがより広範なタスクを実行するための基盤を築きます。将来的に、熱応答性LCEだけでなく、光応答性や電場応答性などの他のスマート材料との統合により、さらに高度で多機能な人工筋肉の創出へと発展する可能性を秘めています。







コメント