主要成果
データ駆動型逆設計フレームワークを適用することで、高周波数の動的性能に最適化され、人間と同等の器用さを持つロボットハンドの開発が実現しました。この革新的なハンドは、リズムゲームやテトリスといった構造化された動的タスクにおいて、持続的かつ高精度な操作能力を実証しました。
技術・臨床詳細
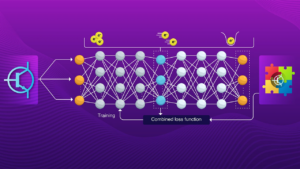
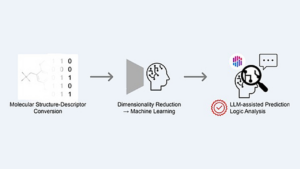
この研究で開発されたデータ駆動型逆設計フレームワークは、まず望ましい動的性能特性(例:特定の周波数での応答速度、精度、力覚フィードバック)を目標値として設定します。次に、広範な材料特性、アクチュエータの選択肢、メカニカルデザインパラメータを含むデータベースを探索します。機械学習モデルは、これらのパラメータと実際の性能データとの関係を学習し、目標性能を達成するための最適な設計パラメータを逆算します。この最適化プロセスは、従来の試行錯誤による設計サイクルを大幅に短縮し、計算効率を高めます。ロボットハンドの検証は、リズムゲームやテトリスのような高速かつ精密な動作が要求されるタスクを通じて行われ、これによりハンドが動的な操作シナリオにおいて一貫して優れた性能を発揮することが確認されました。例えば、テトリスのブロックをリアルタイムで認識し、適切な向きに回転させて配置する際にも、人間と同等かそれ以上の速度と精度でタスクを完了することが可能になりました。
背景・業界文脈
現代のロボティクスにおいて、特にマニピュレーターやロボットハンドは、多様なタスクをこなすための中心的な要素です。産業用ロボットは高い精度と速度を持つものの、その柔軟性は限られており、人間が行うような複雑で繊細な器用さを再現することは困難でした。ヒューマノイドロボットやサービスロボットの分野では、人間環境での複雑な相互作用に対応するために、より人間らしい動的性能を持つハンドが強く求められています。従来の設計手法では、膨大な数の設計パラメータと材料の組み合わせから最適なものを手動で選択する必要があり、時間とコストが膨大にかかっていました。今回のデータ駆動型逆設計フレームワークは、このボトルネックを解消し、より効率的かつ科学的なアプローチで高性能なロボットハンドを実現する道を開きます。
今後の展望
このデータ駆動型逆設計フレームワークは、ロボットハンド設計だけでなく、様々なロボット部品や機能性材料の最適化に応用される可能性を秘めています。将来的には、この技術が製造業の自動化、医療分野(例:手術支援ロボット)、災害救助、サービスロボティクスなど、多岐にわたる分野でのロボットの能力を向上させるでしょう。特に、人間との協働が求められる環境において、より自然で安全、かつ効率的なインタラクションを実現するための基盤となることが期待されます。これにより、ロボットは単なるツールの域を超え、より高度なパートナーとしての役割を果たすようになり、社会全体の生産性と生活の質の向上に貢献するでしょう。
元記事: https://www.mdpi.com/2313-7673/11/6/434
毎週の技術動向レポートを無料でお届け
各分野の分析レポートを読む価値があるかどうか一目で判断できるインフォグラフィックをメールで受け取れます。
📢 メールマガジンに無料登録(週刊・技術動向レポート)
ご登録いただくと、Troy-Technical から週刊で技術動向レポート(メールマガジン)をお届けします。
- 取得したメールアドレス・選択分野は配信目的にのみ使用します。
- 第三者へ提供することはありません。
- 配信はいつでも解除できます(各メール下部のリンクから)。
詳しくはプライバシーポリシーをご覧ください。
登録は1分・いつでも解除できます





コメント