背景:ソフトロボティクスの進化と材料の限界
従来のロボットは硬質な金属部品で構成されることが多く、複雑で柔軟な動きの実現や人間との安全なインタラクションには限界がありました。これに対し、ソフトロボティクスは、ゴムやシリコンなどの柔軟な材料を用いることで、より生物的な動きや適応性を追求する分野として注目されています。しかし、ソフトロボットの性能を最大限に引き出すためには、外部からのアクチュエータに依存するのではなく、素材自体が自律的に動きを生成・制御できる「スマート材料」の開発が不可欠でした。特に、人工筋肉のような機能を持つ材料は、ソフトロボットの設計自由度を大幅に高める可能性を秘めています。
ハーバード大学による3Dプリント人工筋肉の革新
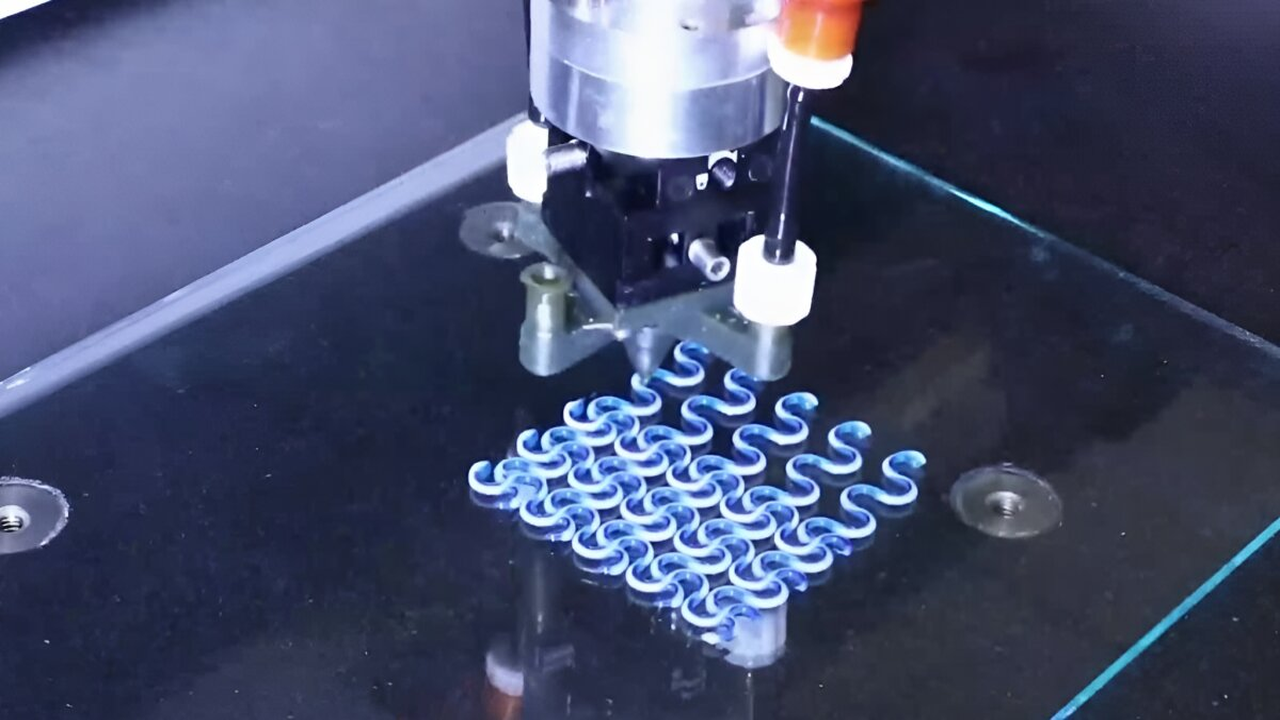
ハーバード大学ジョンA.ポールソン工学応用科学部の研究チームは、この課題に対し、画期的な3Dプリント技術を開発しました。彼らが開発したのは、人工的な筋肉のような動作を再現できるフィラメント状の材料です。この材料は、以下の二つの主要な要素を組み合わせて作られています。
- 能動型液晶エラストマー (Active Liquid Crystal Elastomer, LCE): 熱を加えることで、その分子配向が変化し、プログラムされた方向に収縮または膨張する特性を持つスマートポリマーです。これにより、素材自体が「筋肉」のように能動的な動きを生み出すことができます。
- 受動型エラストマー: LCEの動きを制御し、不必要な変形を抑制するための安定剤として機能します。この受動的な層が、能動的なLCEの動きに構造的な制約を与え、特定の複雑な動作パターンを実現可能にします。
この3Dプリントシステムでは、両方のエラストマーを精密に配置・積層することで、フィラメント状の素材に直接、複雑な動きをプログラミングできます。これにより、個別の部品を組み立てるのではなく、材料自体がアクチュエータとして機能する「マテリアルインテリジェンス」を実現しています。
技術的な意義と将来の展望
この3Dプリント可能な人工筋肉は、ソフトロボティクス分野に大きな影響を与えると考えられます。従来のソフトロボットは、空気圧や液圧システムなど外部のアクチュエーション機構に依存していましたが、この新素材は、より軽量で、構造的にシンプル、かつエネルギー効率の高いシステム構築を可能にします。将来的には、以下のような応用が期待されます。
- 適応型ソフトロボットグリッパー: 様々な形状や柔らかさの物体を優しく、かつしっかりと掴むことができるグリッパー。
- 生体医療デバイス: 体内で柔軟に動作する内視鏡、ウェアラブルセンサー、あるいは人工臓器の駆動部など。
- 形状変化型ロボットシステム: 環境に応じて自律的に形態を変えることができるカメレオン型ロボットや探索ロボット。
- スマートテキスタイル: 温度変化や外部刺激に応じて通気性や形状を変化させるスマート衣料。
この技術は、ロボットがより自然な形で人間社会に溶け込み、安全で効果的なインタラクションを実現するための重要な一歩となるでしょう。材料科学とロボット工学の融合によって、これまでにない機能を持つ自律的なシステムが次々と生まれる未来が期待されます。
元記事: https://newatlas.com/robotics/3d-printing-robots-human-like-muscles/




コメント